EV Drive Unit Robotic Assembly
Project role and responsibilities
Lead Mechanical Engineer- Cycle sequence chart
- Managing mechanical design completed by internal team members
- Managed station layouts and integration of station components
- Pneumatic system component selection and schematics
- Alignment and calibration tools along with pertaining documentation
- FAT qualifications and procedures
- Site installation planning
Overview
Cycle time: 32 seconds
Project timeline: 42 weeks
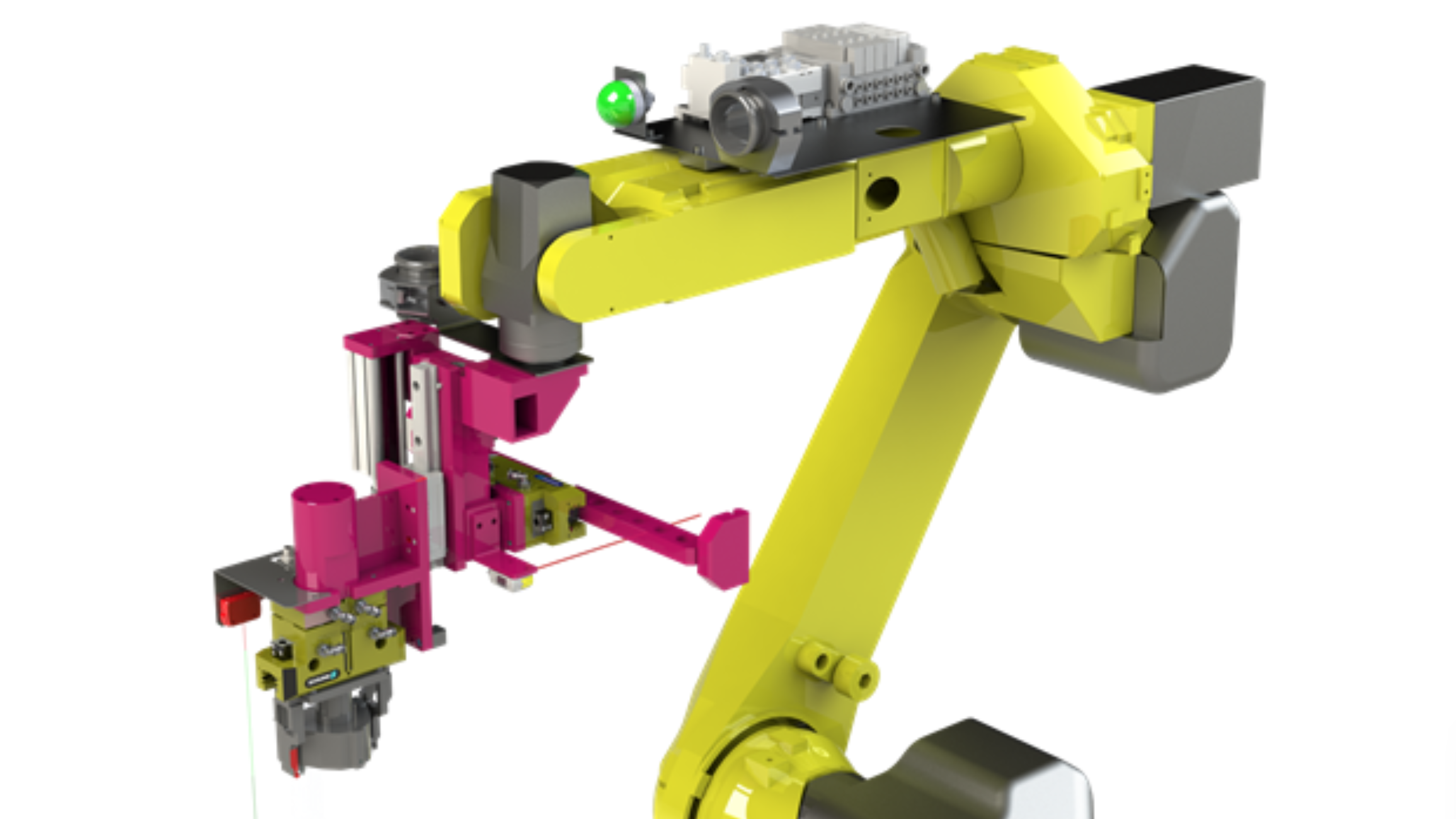
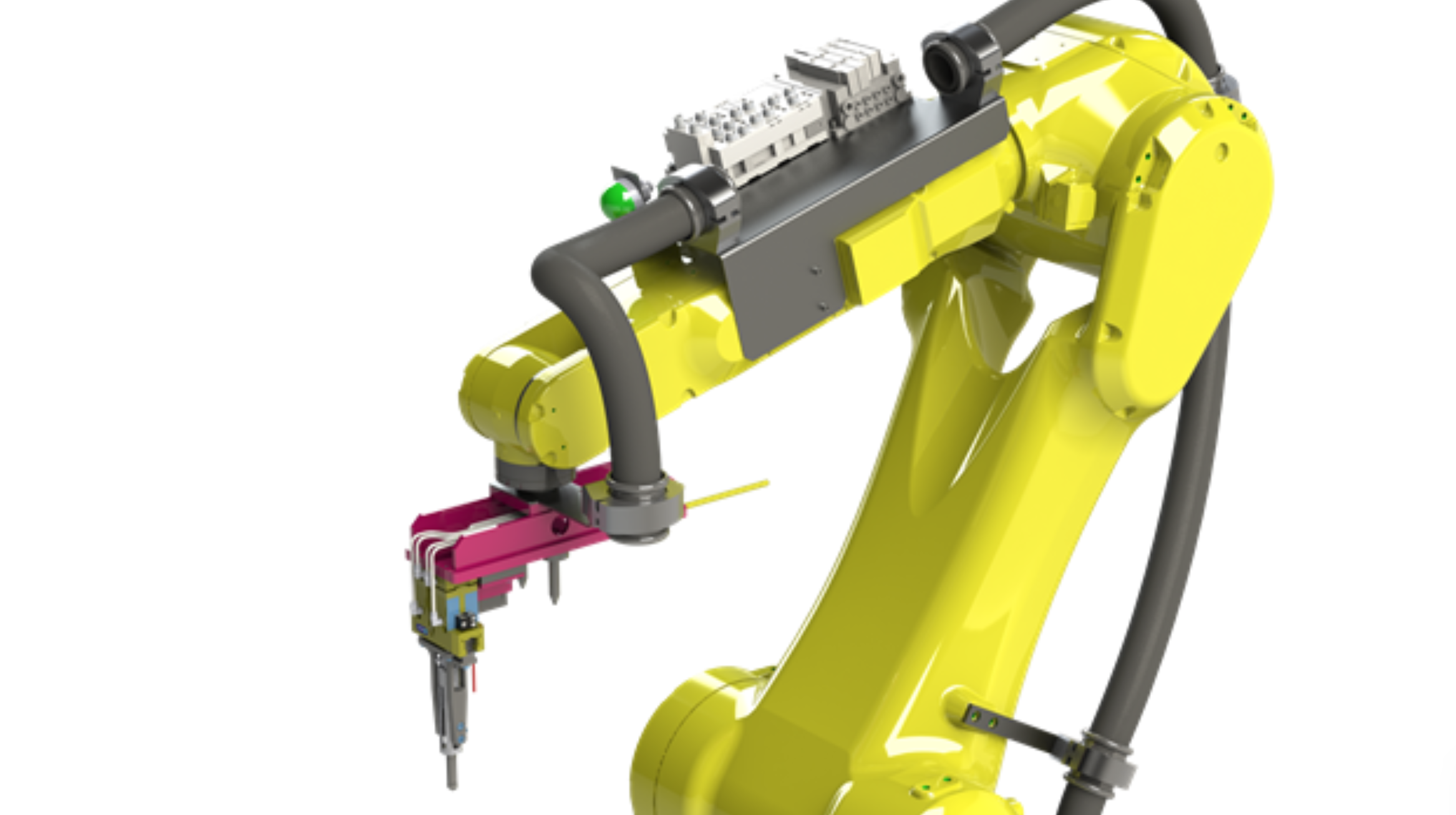
Robot EOAT payloads: 25-kg & 35-kg
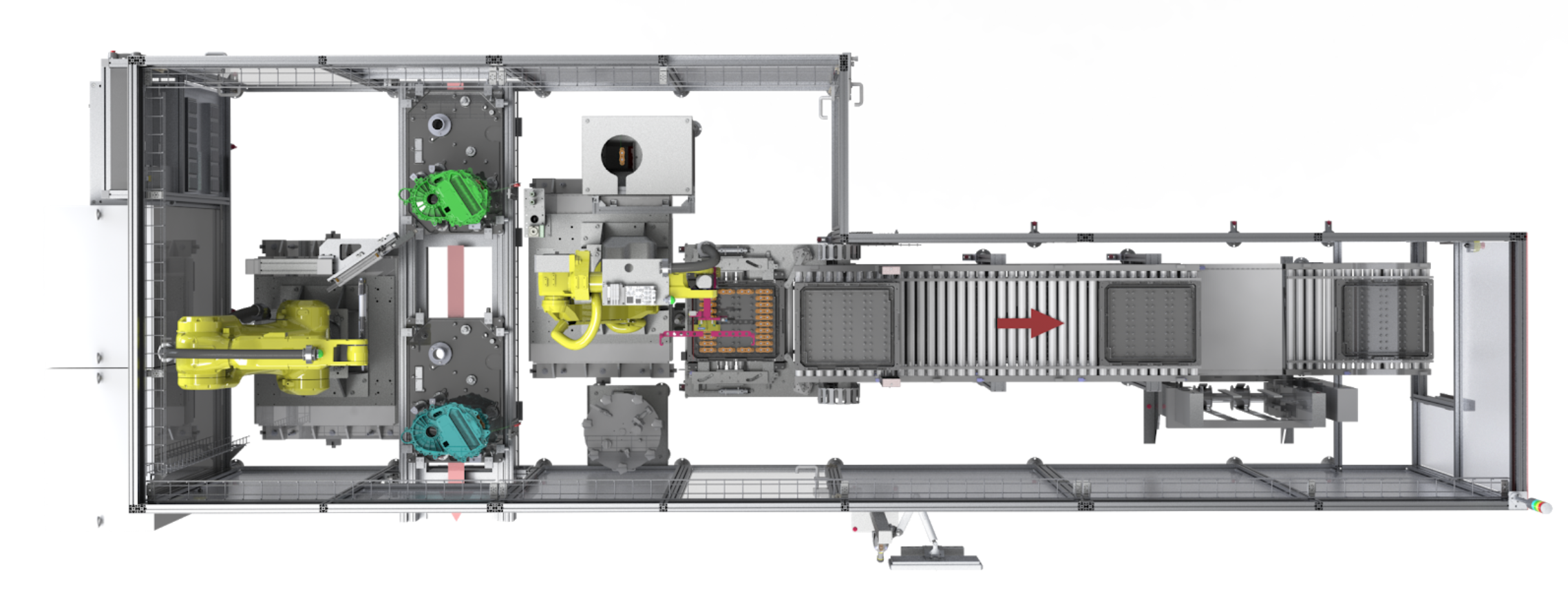
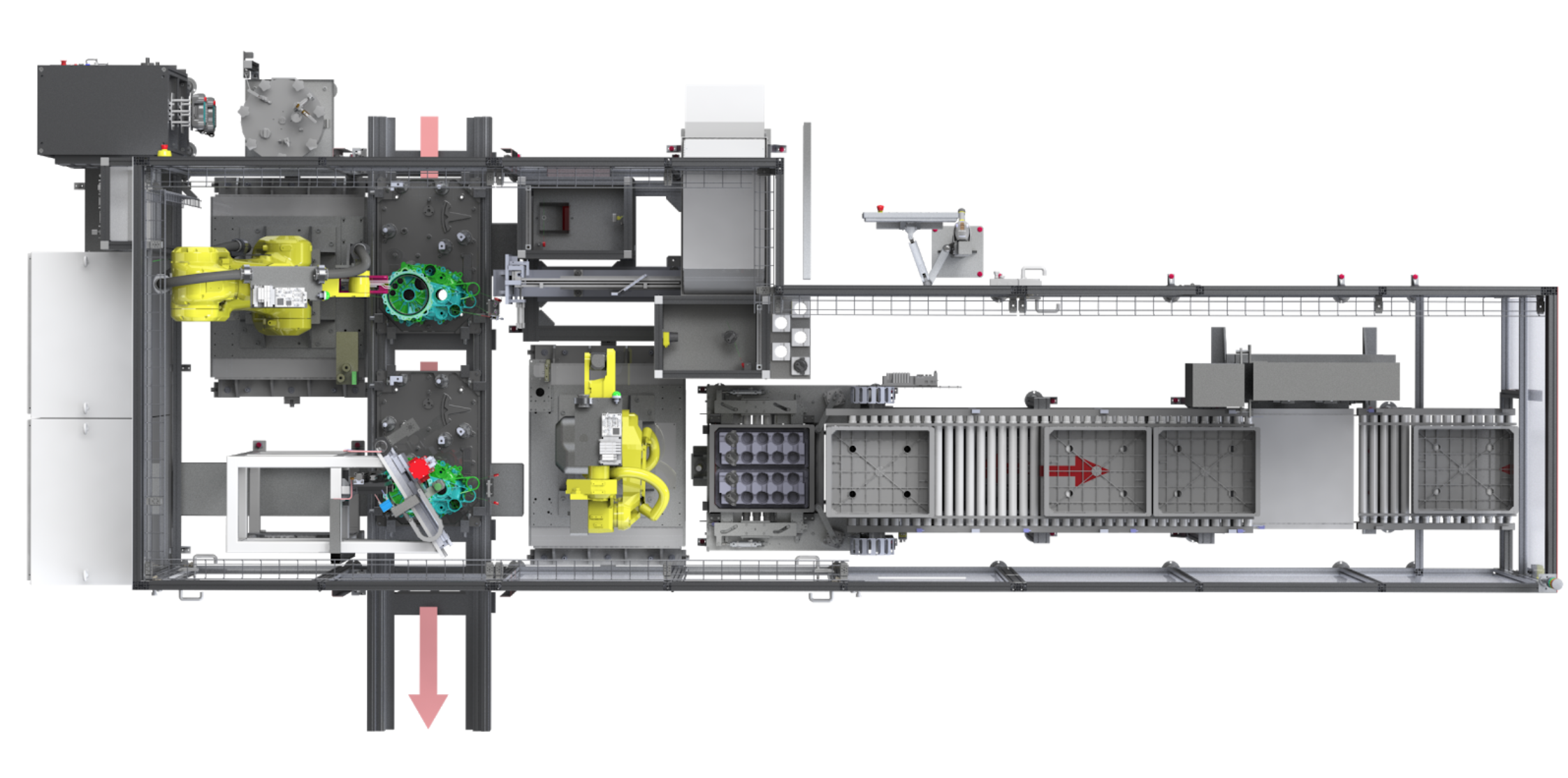
This project is comprised of two(2) phases each consisting of three(3) separate stations installed at various stages of an EV drive unit assembly line. Total project delivery is six(6) stations. They replaced existing manual operator stations in order to reduce operator headcount. Each station is tasked with installing 1-2 components into a drive unit that is located on a work pallet shuttled along a conveyor loop. As shown in Figure A3.1 and A3.3, stations 1 and 3 are supplied component material via tote stacks along an over-under roller conveyor. Station 2 is supplied material by two dial tables consisting of component stacks. All material infeed is verified with barcode scanners located on either totes or packaging boxes.
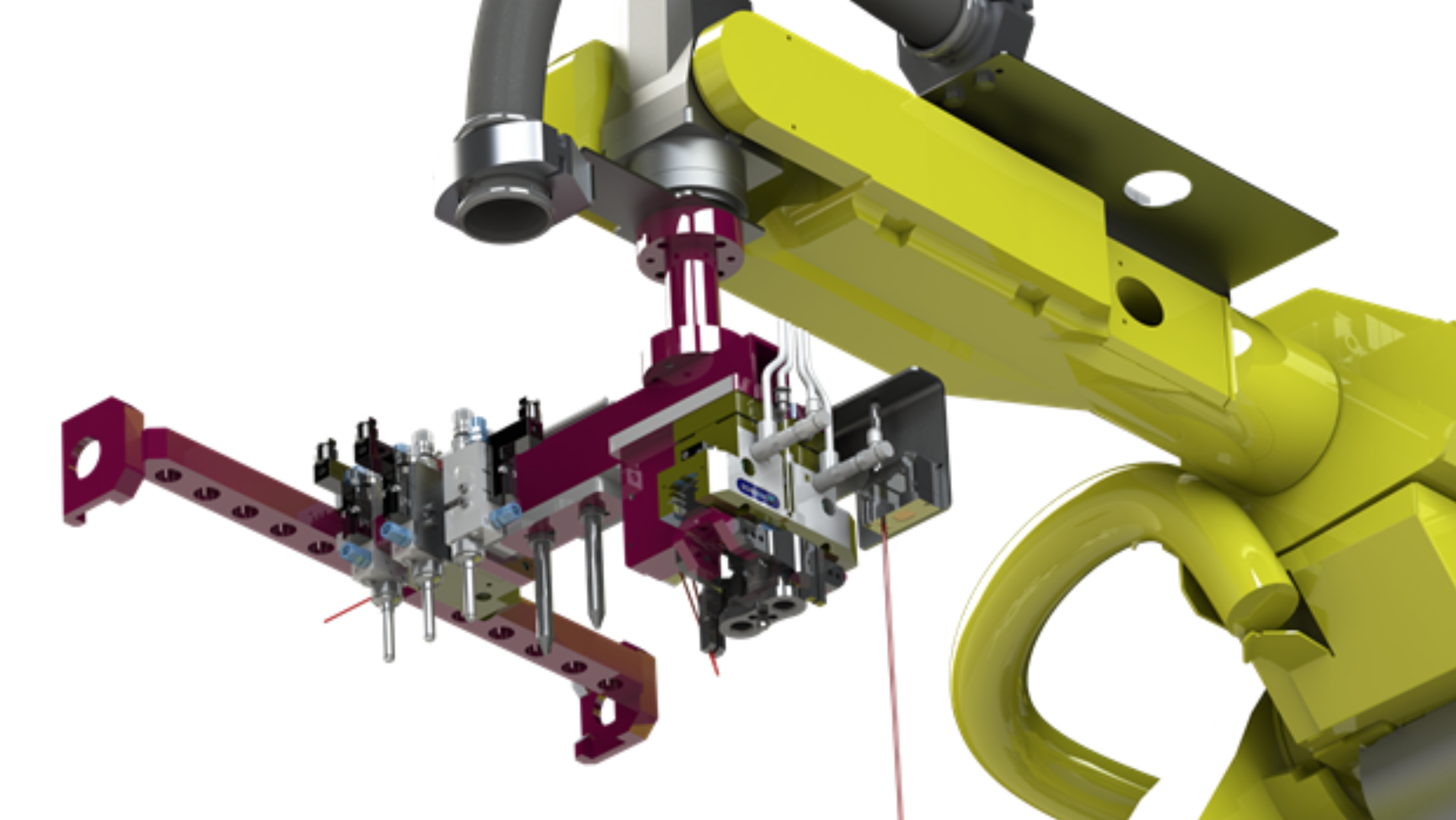
Each robot is tasked with installing individual components, first by picking them from respective material supplies, transferring them to an inspection module to verify quality compliance, before proceeding to installation. For stations that require lubricant application, the robot performs this task with an integrated spray nozzle on their respective end-of-arm tools. Installation at the various stations are all monitored by insertion forces, vision presence checks, and fastening torques.