Vial Tray Auto Unload
Project role and responsibilities
Supporting Mechanical Engineer- Mechanical design of part gripper unit mounted on overhead gantry system
- Joint project efforts with Germany office
Overview
Cycle time: 1.5 seconds on main machine, 27 seconds for pick from tray
Project timeline: 40 weeks
Purpose of the station is to auto unload empty vials from a packaging tray and present for feeding into an auto filling machine. A tray of 162 vials (9 rows, 18 per row) is manually loaded onto an infeed conveyor. The tray is indexed towards a locating unit where it is isolated and positioned for pick. An overhead servo gantry unit shuttles the part gripper unit into position for retrieval of an entire row of 18 vials per pick and transfers them onto an outfeed chute, presenting them for feeding. The pick and place gantry performs this process across three(3) infeed conveyors.
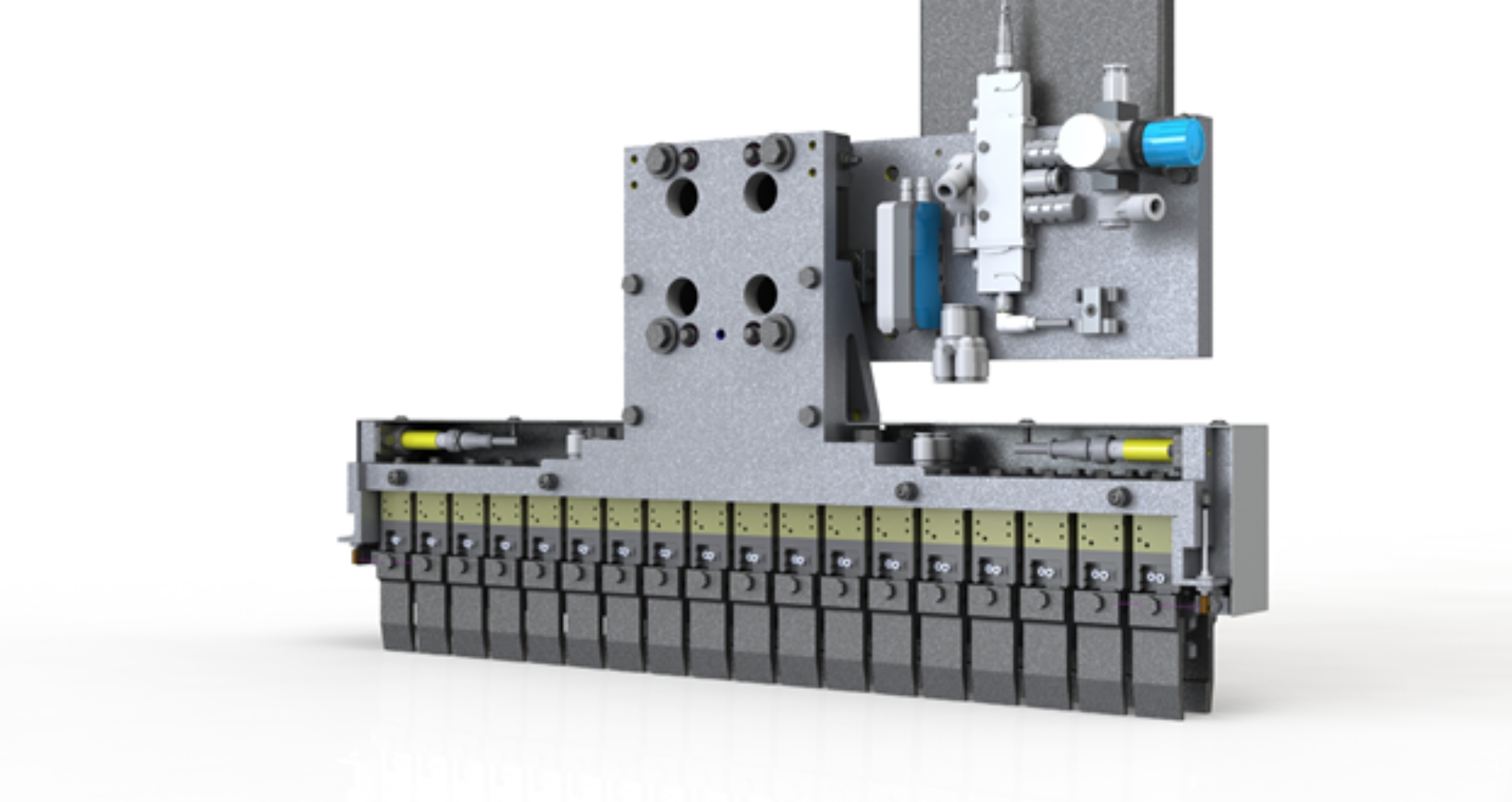
The gripper unit is comprised of 18 individual grippers that are mounted to a base plate. The base plate serves as a manifold to distribute air directly to each gripper, allowing for mounting of each gripper directly adjacent to each other without the interference of fittings and air lines.